Abudorilab.です。 前回はモータを回すためには、Hブリッジ回路を使うと回転方向を変えられ、PWMを使うと回転速度を変えられることを解説しました。 今回はHブリッジ回路を簡単に使うことができる便利IC(モータドライバIC)を使って、プログラムからモータを回します。
TB67H450 のアプリケーションシートを読んでみよう
前回Hブリッジ回路を紹介しましたが、実際にはHブリッジ回路を自分で設計して半田付けするわけではなく、便利IC(以後、モータドライバIC)を使います。 モータドライバICはTB67H450を使用します。実際に使用するときはデータシートやアプリケーションシートを読みます。
販売ページ
秋月電子の販売ページからTB67H450のデータシートを見てみましょう。 必ず確認するのは絶対定格です。このようにこのICに流して良い電流量や電圧などを知ることができます。絶対定格はそのICの電流量や電圧の限界値です。一瞬でも、ほんの少しでも超えた瞬間に壊れてしまいます。まさに“絶対”定格です。

今回はこちらのモーターを使用します。
")
まずこのモータは12Vで最高速度になります。モータに関しては12Vを超えた瞬間にモータは即座に壊れるわけではありませんが、12Vに留めておきます。つまり、0Vで停止、12Vで最高速度になる運用をするということです。 電流は最大で1A位使用するはずです。これはモータの大きさや運ぶ物の重さなどですが、経験でわかってきます。今回は1Aと思ってください。
以上から、絶対定格を確認するとモータ出力電圧は50[V]、モータ出力電流は3.5[A]と書いてあるので、今回の実験では壊れない(むしろオーバースペックである)ことがわかります。電気の世界では、余裕を2倍くらいは持っておくと良いでしょう。例えば、モータを手で強制的に止めた状態では瞬間的に2倍くらい(つまり2Aくらい)電流が流れることがあります。また、電源をつけた瞬間などはコンデンサが充電しようとするので、ほんの短い時間、ほぼショートと同じくらいの電流量が流れます(これを突入電流という)。なので、絶対定格からはかなり余裕があるものを選ぶと良いです。
入力ピンを確認します。
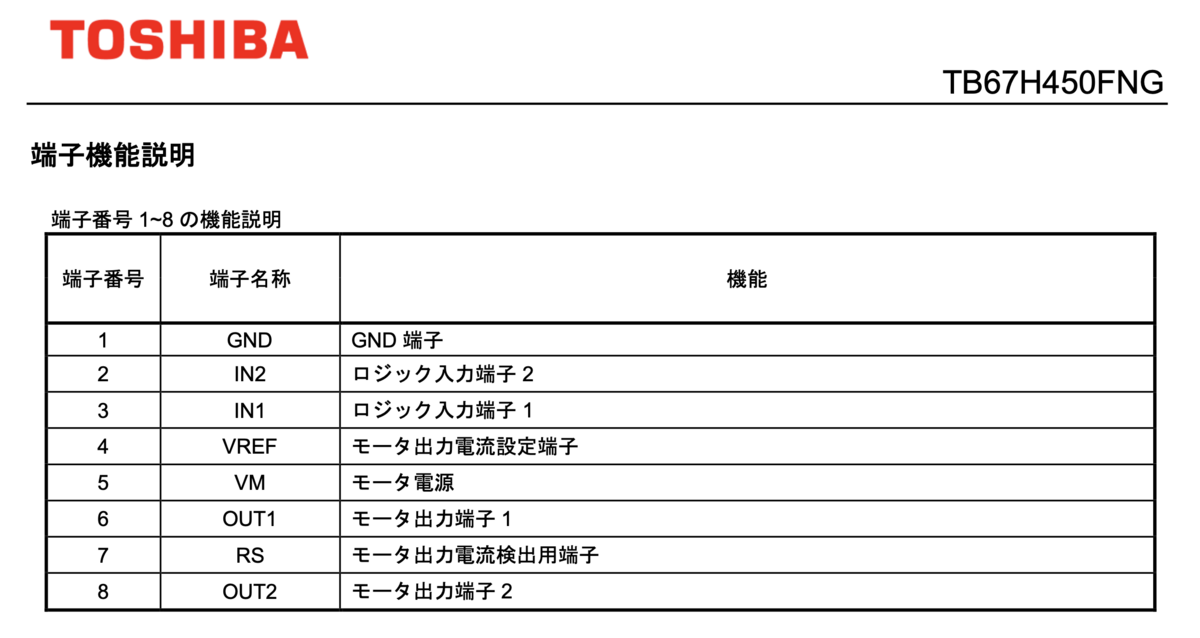
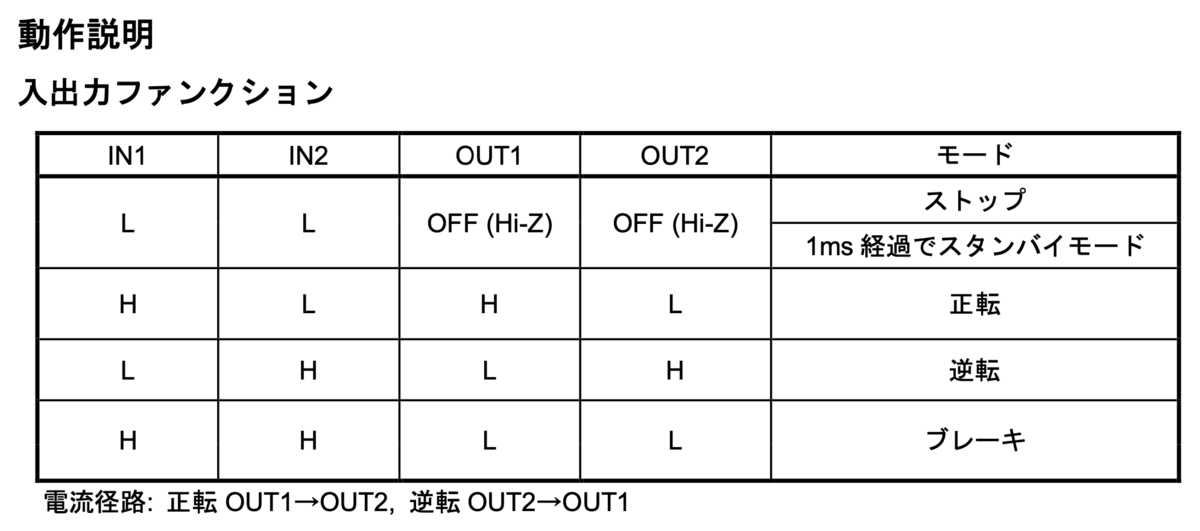
前回記事でも紹介しましたが、IN1、IN2のピンのH/LからOUT1、OUT2の出力が変わり、正転、逆転、停止の動作をするようになりそうですね。
アプリケーションシートには、実際にこのICを使う際の参考用の回路図が載っていることが多いです。
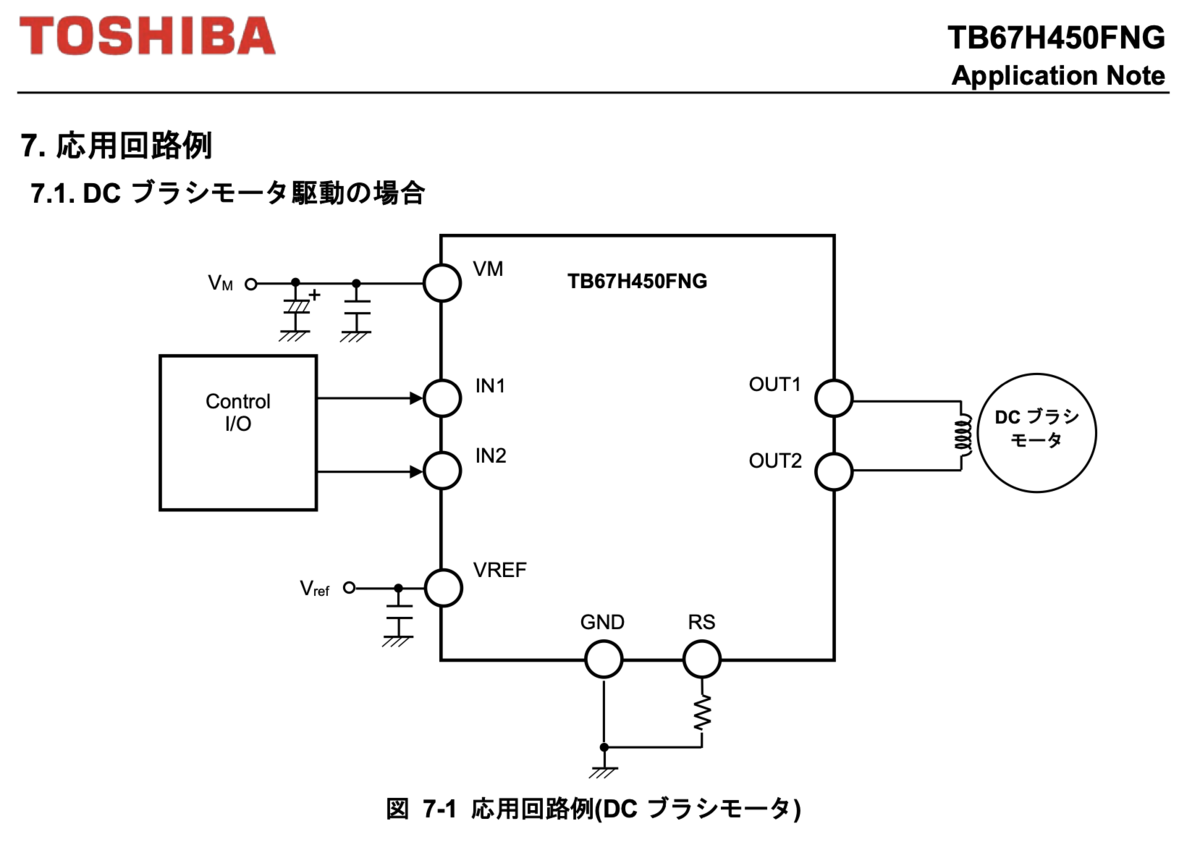
これを参考に実際に回路を作ってみましょう。
スポンサードリンク
ブレッドボードで回路を作ってみる
では、上記の資料を元に回路を作ってみましょう。
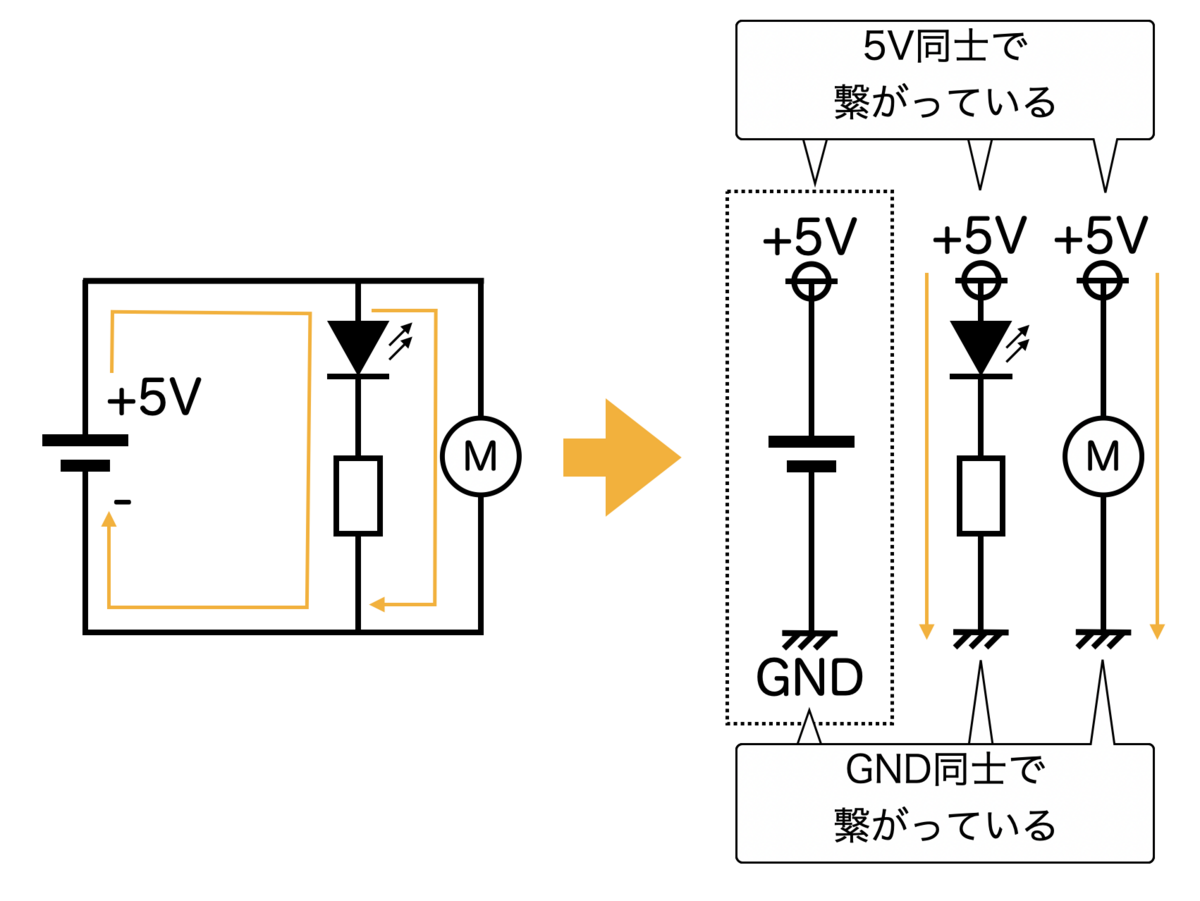
回路は次のように表記します。 電池から輪っかのようにプラスからマイナスまでの接続図を表記していましたが、これを省略します。 図はLEDとモータが電池に接続されている図です。ここからさらにモータを10個追加、LEDを15個追加…としていくと輪っかのように書いている場合ではありません。電池のマイナスはGND(つまり0V)、電池のプラスは電圧(ここでは5V)を同じシンボルにまとめてそこから引き出します。 図の右側のように、5VからLEDと抵抗を通ってGNDに、5Vからモータを通ってGNDに。このように書くことでスッキリ書くことができます。 多くの場合、点線の四角の電池も5Vなどの電圧さえ分かれば理解できるので省略します。同じ記号同士が繋がっていると思って回路を読んでください。
前述のアプリケーションシートのDCブラシモーター応用回路から接続を考えてみます。 今回はこのように繋いで実験します。

回路は実験としてブレッドボードを使います。ブレッドボードはジャンパー線を抜きさしするだけで簡単に回路を作ることができます。 半田付けしなくても良いのでまずこれでテストして上手くいったら本番基板を作ることが多いです。


 引用:https://shop.sunhayato.co.jp/blogs/problem-solving/breadboard
引用:https://shop.sunhayato.co.jp/blogs/problem-solving/breadboard
ブレッドボードを初めて知った方はこちらをご覧ください!このような構造で手軽に回路の実験や設計した回路が正しいかの確認を行うことができます。 shop.sunhayato.co.jp
次回
長くなったので、回路自体の解説は次回して行きます。全体の回路を見て難しいと思った人は多いと思いますが、機能ごとに分割して読み解いていくと案外単純です。細かく解説するので初心者必見です。
こちらから次の記事に進めます。 www.abudorilab.com