前回のこの記事からの続きとなります。 モータドライバICであるTB67H450を使うためにデータシートを読みました。
アプリケーションシートを参考にして、この回路になるようにブレッドボードで作業して行きます。

スポンサードリンク
回路の作り方
いきなり、回路のカタマリの図を理解しようとするのは大変ですので、ブロックごとに解説します。
電源の接続
まずはTB67H450に電源を入力します。このIC自体を動かす電力とモータを回す電力を供給します。

今回は12Vモータを動かすため、12V電源を入れます。今回は12Vを出力してくれるACアダプターを使います。
![[PSE取得品]ANLINK 12V 2A/2000mA 電源アダプター、AC 100-240V 50/60Hz から DC 12V 2A/2000mA 24W 5.5x2.1mm ウォールチャージャー、センターポジティブ、1.8M 20AWG ロングケーブルで安定して柔軟に使用](https://m.media-amazon.com/images/I/41YqhV3tGTL._SL500_.jpg "[PSE取得品]ANLINK 12V 2A/2000mA 電源アダプター、AC 100-240V 50/60Hz から DC 12V 2A/2000mA 24W 5.5x2.1mm ウォールチャージャー、センターポジティブ、1.8M 20AWG ロングケーブルで安定して柔軟に使用")
12VのACアダプターからブレッドボードに引き出して使います。このような部品を使うとブレッドボード内にDCジャックの端子から引き出すことができます。

回路図にある太い二本線はコンデンサです。コンデンサはノイズを吸収する作用があります。 実はアプリケーションシートに“このコンデンサを挿してくれ!”と指示してあります。 なので、素人は(ICを作った東芝の専門家以外は)おとなしく言われた通りの回路を作りましょう笑。
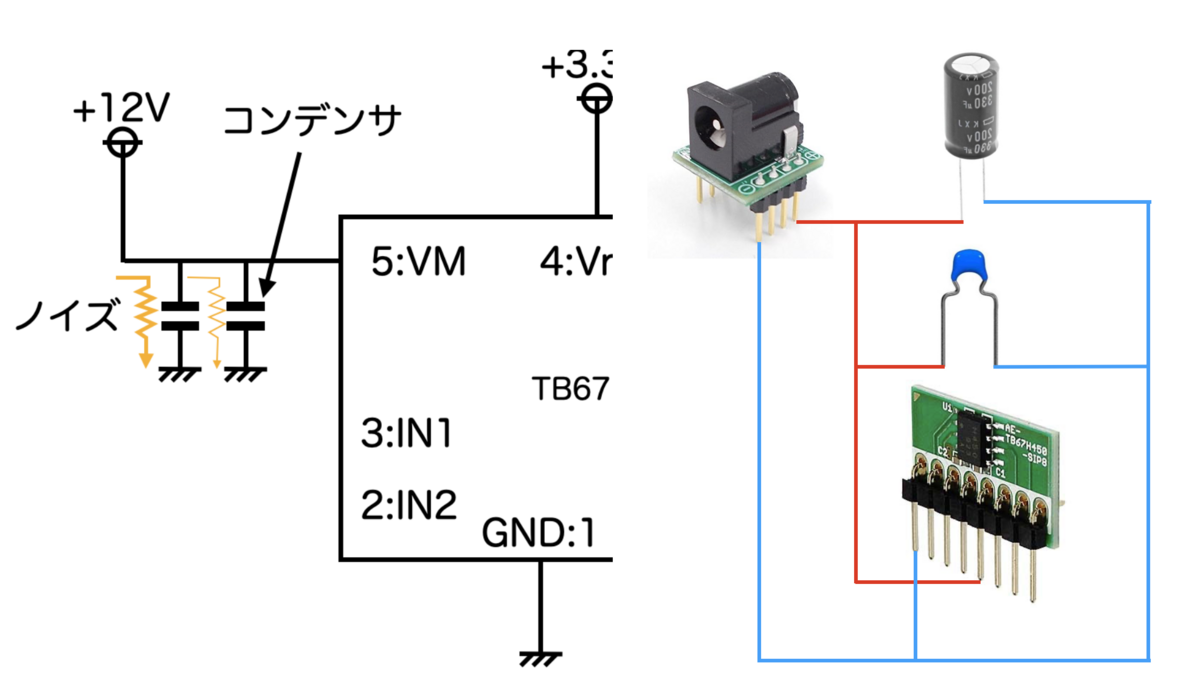
12Vのプラスを電解コンデンサのプラスに(黒いコンデンサの足の長い方)、積層セラミックコンデンサのプラスに(青いコンデンサはどちらにさしてもOK)、 TB67H450の5番ピンに差しましょう。12VのGNDに電解コンデンサのマイナス(黒いコンデンサの足の短い方)、積層セラミックコンデンサのマイナスに(青いコンデンサはどちらにさしてもOK)、TB67H450の1番ピンに差しましょう。

モータ駆動部
モータドライバICとモータを繋げて、モータを回るようにします。前前回解説した通り、Hブリッジ回路によって、モータを正転、逆転させることができます。回転の向きによってプラスとマイナスが入れ替わるので、ICにはOUT1、OUT2と表現されています。どちらがプラスと決まっていないからです。このOUT1、OUT2ピンにモータから伸びているハーネス(ケーブル、電線のこと。着脱しやすいようにコネクタが付けられたケーブルのことをハーネスと言う)と接続します。


モータ側の配線を見るとモータが1番ピンと6番ピンであることがわかります。次のようにモータドライバICとモータを接続してみましょう。“電源の入力”で挿したものは、見やすさのために省略しています。わざわざ抜かなくていいです。

マイコン接続部
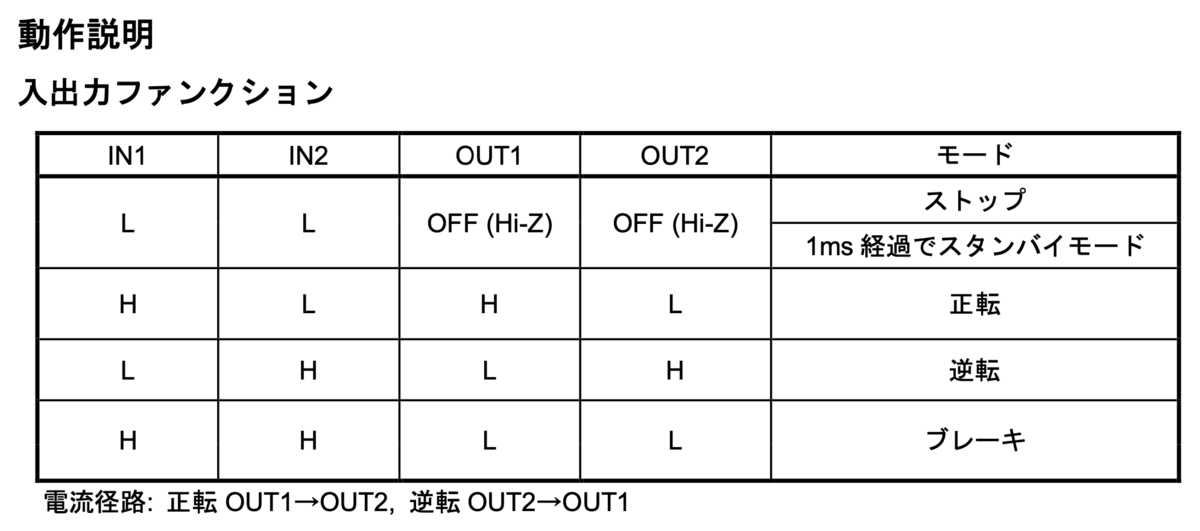
マイコンとモータドライバICを接続します。モータドライバIC側は、IN1、IN2の二つをHまたはLにすることで、モータの正転、逆転、停止を受け付けましたね。
では、マイコンのどこに繋ぐのか見て行きます。
今回のマイコンはRaspberry Pi Pico(以後Pico)です。Picoは高性能で価格が安く、たくさんの便利機能が詰め込んであります。今後の工作は基本的にPicoシリーズを使用します。

届いた状態だと、このように足がないので半田付けするか、ハンダ済みのものを購入してください。(結構注意)
 はんだ付け済みヘッダー、開発ボード、Python C Java コード、詳細なチュートリアル、サンプル プロジェクト")
では、Picoのどこに繋げばいいのかと言うことになりますが、これもそう。データシートを読みましょう、です。
https://datasheets.raspberrypi.com/pico/Pico-R3-A4-Pinout.pdf
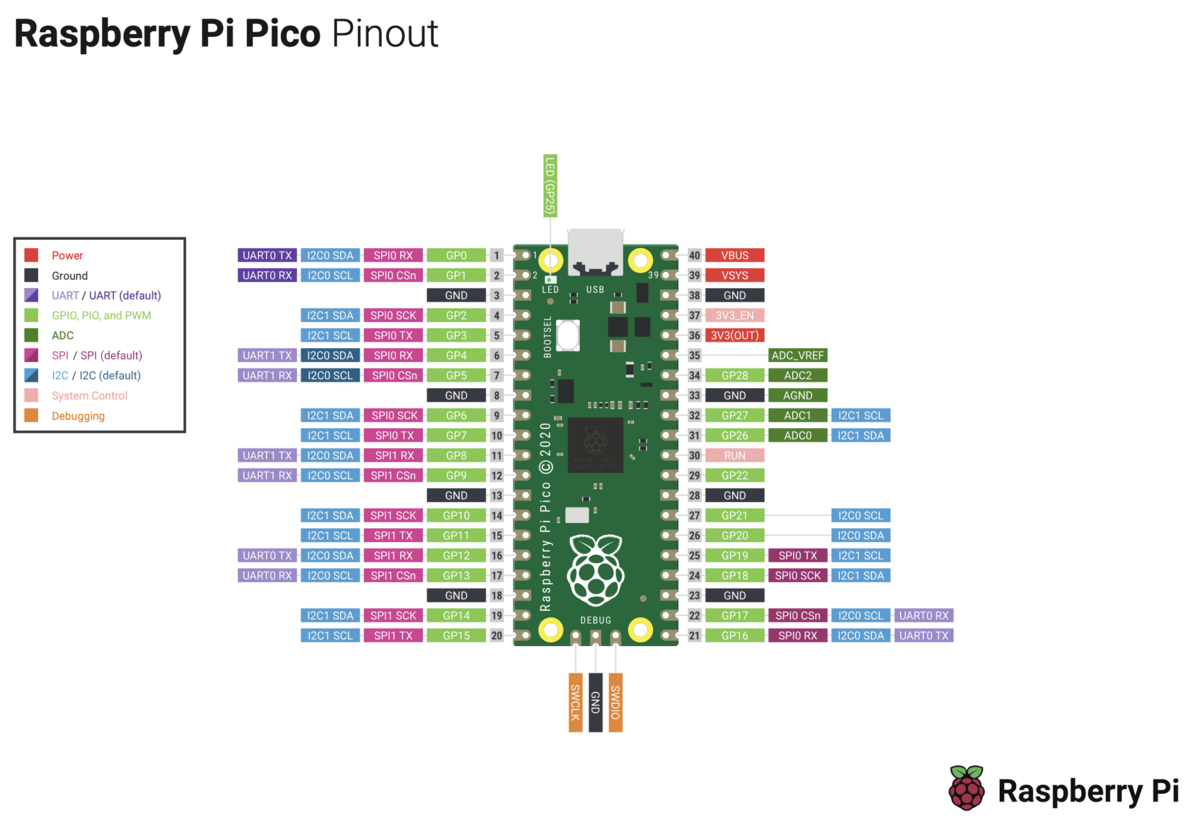
この画像の凡例をみましょう。今回はPWMを出したいので、どれができるかを確認すると黄緑色で表示されているピンとなります。 黄緑色のピンであれば本当にどこでもいいのですが、他の機能との兼ね合いを見てピンを決めます。 今回の実験はモータードライバのIN1、IN2と繋ぐだけなので、どこでもいいです。GP16、GP17を使ってみましょう。
他の色機能として、センサの値を送受信するのに使われるI2C通信、SPI通信や他のマイコンやPCと通信できるUART通信などがあります。 データシートのピンを見ると複数の機能が使えるピンがあることがわかります。これはプログラムで設定するとその機能に自由に変化させられる魔法のピンです。 大抵の場合、UART通信やSPI通信などピンが限られているものを先に割り当てて余ったものを昨日の少ないピンに割り当てます。他には回路の物理的な制約(マイコンの右側にモータードライバICを置いちゃった!など)でピンを割り当てることもあります。
繰り返しますが、今回はたった2ピン、しかもどのピンでもできることをやるだけなので、本当にどこでもいいです。好きなところで繋げましょう。
次にVrefピンとRSピンを繋ぎます。Vrefに適切な電圧、RSピンに抵抗を繋ぐと最大出力電流を設定できるとデータシートに書いてあります。モータに思った以上に負荷がかかったときに制限できる機能ですが、今回は難しいので使いません。「定電流制御機能を無効にしたい場合は、RS 端子を GND に接続し、VREF 端子に 1~5V を入力してください。」と書いてあるので、VrefピンにはRaspberry Pi Picoの3.3Vピンを、RSピンにはRaspberry Pi PicoのGNDを接続します。
モータドライバのGNDピンもRaspberry Pi PicoのGNDピンと接続します。
この接続をすると以下のようになります。


スポンサードリンク
全体の接続図
以上の回路を全部合わせると以下のようになるはずです。

マイコンで動かしてみる
マイコンでモータを回すための回路を繋げることができました。次回はRaspberry Pi Picoにプログラムを書き込み、モータを回して行きます。 お楽しみに!